Applications of Spherical Trigonometry in NavigationThese notes are dealing with some principles of spherical trigonometry, which are relevant for practical navigation on the globe. As noticed before, in the following notes geometrical angles are assumed to be expressed in degrees. Also the basic trigonometric functions Sine (sin(x)) and Cosine (cos(x)) are assumed to take their argument (x) in degrees. This also implies that the reverse functions Arcsine (asin(x)) and Arccosine (acos(x)) return their values in degrees. A location or position on the surface of the Earth is uniquely defined by means of Latitude (Lat) and Longitude (Lon), where Latitude is measured from the Equator to the North (positive) or to the South (negative) to the position and Longitude is measured from the Prime Meridian of Greenwich to the East (positive) or to the West (negative) to the position. Similarly, the position of astronomical objects on the Celestial Sphere is determined by Declination (Dec), which is measured from the Celestial Equator to the North (positive) or to the South (negative) towards the celestial position and by Greenwich Hour Angle (GHA), which is always measured Westward from the Celestial Prime Meridian to the position of the celestial object. The Terestrial Navigational Triangle
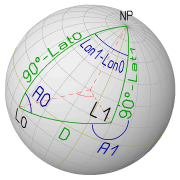
The identities for spherical triangles can be directly applied to the special-case
triangle setup shown in the picture below.
It consists of two arbitrary locations L0
(Lat0, Lon0) and L1 (Lat1, Lon1) and
the North Pole (NP) as vertex points.
These three sides are great-circle segments.
The "Distance Problem": finding distance D and true bearings A0 and A1With the "Law of Cosines for Sides" applied for side D the following result is obtained:cos(D) = cos(90°-Lat0)*cos(90°-Lat1) + sin(90°-Lat0)*sin(90°-Lat1)*cos(Lon1-Lon0)This can be reduced to: cos(D) = sin(Lat0)*sin(Lat1) + cos(Lat0)*cos(Lat1)*cos(Lon1-Lon0) D[°] = acos[sin(Lat0)*sin(Lat1) + cos(Lat0)*cos(Lat1)*cos(Lon1-Lon0)] This identity gives the "angular" distance D between the locations L0 and L1 in degrees. The distance expressed in nautical miles is obtained by the fact that along a great circle, one minute-of-arc corresponds to one nautical mile. So each degree of angular distance corresponds to 60 nautical miles: D[Nm] = 60 * acos[sin(Lat0)*sin(Lat1) + cos(Lat0)*cos(Lat1)*cos(Lon1-Lon0)]
Notice: The values of the vertex angles A0 and A1 (shown as true bearings in the above picture) can be best obtained by the "Law of Tangens": tan(A0) = sin(90°-Lat1)*sin(Lon1-Lon0) /
[cos(90°-Lat1)*sin(90°-Lat0) - cos(Lon1-Lon0)*sin(90°-Lat1)*cos(90°-Lat0)]
= cos(Lat1)*sin(Lon1-Lon0) / [sin(Lat1)*cos(Lat0) - cos(Lon1-Lon0)*cos(Lat1)*sin(Lat0)]
tan(A1) = sin(90°-Lat0)*sin(Lon1-Lon0) /
[cos(90°-Lat0)*sin(90°-Lat1) - cos(Lon1-Lon0)*sin(90°-Lat0)*cos(90°-Lat1)]
= cos(Lat0)*sin(Lon1-Lon0) / [sin(Lat0)*cos(Lat1) - cos(Lon1-Lon0)*cos(Lat0)*sin(Lat1)]
The angles A0 and A1 can also be deduced with the "Law of Sines", which yield simpler formulas, but with the disadvantage, that the results have an abiguity of 180° (since they are obtained from a Arcsine function). The advantage with the formulas deduced with the "Law of Tangens" is that they yield a unique result over the range -180° to +180°. For obtaining a valid true bearing, just add 360° to the negative values. The identities for D, A0 and A1 are summarized below and are also implemented in an interactive JavaScript for calculating great-circle distances.
In order to steer the directions A0 and A1 as a course,
the following must be considered:
although both angles A0 and A1 refer to the "northern branch" of the
local Meridian, they are only the initial starting courses to steer on
the compass. The "Destination Problem": Finding the Destination Location L1 (Lat1,Lon1)If a great-circle journey is started from a location L0 in an initial direction A0 and the travelled distance is D, the coordinates of the destination location L1 can be found by solving the spherical triangle for the side "90°-Lat1" and the angle "Lon1-Lon0". Applying the "Law of Cosines for sides" for "90°-Lat1" obtains the latitude of L1: cos(90°-Lat1) = cos(90°-Lat0)*cos(D) + sin(90°-Lat0)*sin(D)*cos(A0)
sin(Lat1) = sin(Lat0)*cos(D) + cos(Lat0)*sin(D)*cos(A0)
Lat1 = asin[sin(Lat0)*cos(D) + cos(Lat0)*sin(D)*cos(A0)]
The Longitude of L1 is obtained by applying the "Law of Tangens" to
"Lon1-Lon0":
tan(Lon1-Lon0) = sin(D)*sin(A0) /
[cos(D)*sin(90°-Lat0) - cos(A0)*sin(D)*cos(90°-Lat0)]
= sin(D)*sin(A0) / [cos(D)*cos(Lat0) - cos(A0)*sin(D)*sin(Lat0)]
The summarized results yielding the coordinates of a destination (Lat0,Lon0) for a given departure (Lat0,Lon0), initial bearing (A0) and distance (D):
These identities for the destination location (Lat1,Lon1) are also implemented in an interactive JavaScript for calcutating the destination of a great-circle sailing. The Celestial Navigational Triangle
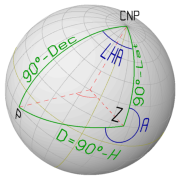
The celestial navigational triangle is used for solving the
"Sight Reduction" problem in the construction of a Line-of-Position
from a measured Altitude (Ho).
This construction requires the calculation of the Altitude (Hc)
of the observed body in the assumed position of the observer.
The celestial coordinates of the Zenith point (Z) are directly obtained from the terestrial coordinates of the assumed position (Lat,Lon): Dec_Z = Lat and GHA_Z = 360°-Lon.
The remaining elements of the Celestial Navigational Triangle are
obtained as follows:
The meridian segments of the triangle are the complementary angles
of the Declination of the Zenith point
(90° - Dec_Z)
and of the Declination of the position of the celestial body
(90° - Dec_P). Altitude and AzimuthAlthough, the position of the observer is unknown in the "navigation problem", an assumed position must first be used for the calculations. And in a next step, the correct location can be calculated from this assumed position. This method is known as "Altitude-Intercept Method" and was developed by the french navy commander Adolphe-Laurent-Anatole Marcq de Blonde de Saint-Hilaire at the end of the 19 th. century. It requires the calculation of Altitude (Hc) and the azimuth (Az) of a celestial body for the assumed position. To calculate Hc and Az from the Celestial Navigational Triangle, the following is known:
Applying the "Law of Cosines" for sides, the angular distance D can be calculated, while the vertex angle A is obtained with the "Law of Tangens": D = acos[sin(Lat)*sin(Dec) + cos(Lat)*cos(Dec)*cos(LHA)] A = atan[sin(LHA)/(cos(Lat)*tan(Dec) - sin(Lat)*cos(LHA))]
For the "Altitude-Intercept Method" the Altitude Hc and the Azimith angle Az
are required.
These can both be derived from the angular distance D and vertex angle A:
The distance D is the "co-altitude" so: Hc = 90° - D.
The Azimuth angle must be derived from A and from the constellation:
Az = A if Position of the sighted body is East of the Position of the observer or
Az = 360° - A if the Position of the sighted body is West of the observer.
The latter identity is known as the 'time azimuth formula'. The "time" component is included in the value for LHA. If the Altitude H is known (or calculated first), the Azimuth can also be calculated with the following 'altitude azimuth formula':
When using this identity, the Azimuth angle Az is obtained from A
by the following correction: The above identities are implemented in an interactive JavaScript to calculate Altitude (Hc) and Azimuth (Az) of a Celestial Body for an Assumed Position. |
| Cover << Sail Away << Notes on Trigonometry << . | . >> Position from Altitudes | last updated: 03-Dec-2010 |