The Compass
Course Conversions
 |
While navigating, two different courses or directions are in permanent use:
the Compass Course read from the compass and the Course-over-Ground (CoG)
read from the nautical chart.
Both can differ considerably from the True Heading, which is roughly the course
of the vessel through the water (keel line).
|
In a rough approximation, the Course-over-Ground can be used as Compass Course and vice-versa.
This is feasible while sailing in regions with small magnetic variation on a fibreglass yacht,
normally showing low deviation errors and if corrections for drift are neglectable.
However, if accurate and safe navigation is an issue, correct course conversions
between Compass Course and Course-over-Ground will have to be applied.
Compass Course and True Heading
Compass Course and True Heading differ by the compass error.
Compass error is the sum of the magnetic variation, which is location and time dependent and
magnetic deviation, which depends on the magnetic characteristics of the ship and on the
sailed course.
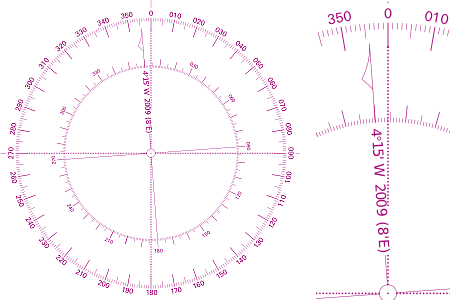 |
Magnetic variation can be obtained from the compass rose on the nautical chart.
It will show the variation of the charted region for a specific year.
Since magnetic variation varies with time, also the rate of change per year is indicated
on the compass rose.
In the example on the left, the variation for the year 2009 is -4°15' (West).
This means, that the compass needle north-pole will point to 355°45' instead of
pointing to True North at 000° (the upper branch of the local meridian).
The annual change of the magnetic variation is +8' (East).
So the variation in this region will slightly decrease in the next years.
|
Magnetic deviation is the magnetic influence of the immediate environment upon the compass.
It is usually caused by the steel or iron aggregates installed on the ship.
Especially on steel ships the deviation may be considerable.
The deviation also depends on the orientation of the ship within the earth magnetic field.
Practically, the compass deviation depends on the heading of the ship.
Therefore, a "Deviation Table" should be elaborated for each permanently installed compass
showing the compass deviation for different headings or courses (000° through 360°).
The conversion scheme for obtaining True Heading from the Compass Course is as follows:
True-Heading = Compass-Course + deviation + variation
Both deviation and variation have an algebraic sign: deviation/variation pointing
to West are negative - deviation/variation pointing East are positive.
Magnetic Heading is the compass course corrected for deviation only:
Magnetic-Heading = Compass-Course + deviation
Although "Magnetic Heading" has no real practical meaning it is used as intermediate result
in the course conversion schemes and as input parameter for the (inverse) deviation table.
Compass
Course |
Deviation |
Magnetic
Heading |
Variation |
True
Heading |
|
|
|
|
| 056° |
-3° |
053° |
+1° |
054° |
|
|
|
|
| ------------ add corrections ---------> |
Example: the compass reading is 056°, deviation is -3° (W) and variation is 1° (E).
The True Heading is 054°.
In the above scheme, corrections are added proceeding from left to right and corrections are
subtracted working from right to left.
Example: from the nautical chart we read a True Heading of 245° deviation is +4° (E)
and variation is +1° (E). In this case, the helmsman will have to steer a Compass Course
of 240°.
Compass
Course |
Deviation |
Magnetic
Course |
Variation |
True
Heading |
|
|
|
|
| 240° |
+4° |
244° |
+1° |
245° |
|
|
|
|
| <--------- subtract corrections ------- |
True Heading and Course-over-Ground
 |
To account for drift due to leeway and current,
the True Heading will have to be corrected further to obtain the Course-over-Ground.
The Course-over-Ground (CoG) should correspond to the planned Course Line
in the nautical chart.
In the example on the left the CoG to safely cross the narrows between the two
islands is 250°. To account for the drift due to the indicated wind and current,
the course to steer (Compass Course) will have to be lower.
|
To obtain the necessary drift corrections, the influence of leeway and
current on the course of the vessel will have to be determined expressed
in degrees. As with deviation and variation, the corrections for drift will
have to have assigned an algebraic sign: when a drift component sets the
vessel to port (e.g. wind from starboard), it's sign will be negative; when
drift sets to starboard (e.g. wind from port), the sign for the correction
will be positive.
Leeway
Each sailing vessel will be set leeward by some amount.
Accumulated over time this will result in a deviation from the expected
position, which can be specified by a course correction for leeway expressed in degrees.
Corrections for leeway must be estimated from observed deviations of accurately
determined positions and by experience.
Correcting the True Heading for leeway gives the direction of the vessel through the water
(Course-through-the-Water).
Leeway depends on the sailed course compared to the direction of the wind
("Point of Sail") and also on the specific form of the hull as well as on the wind force.
By observing leeway in current-free waters under different sailing conditions, a table similar to the
following can be elaborated (e.g. by comparing True Heading course with the GPS-derived CoG):
| Point of Sail |
Wind 3-5 Bft. |
Wind 6-7 Bft. |
Wind > 7 Bft. |
| close hauled |
2° - 4° |
5° - 10° |
12° - 20° |
| beam reach |
2° - 3° |
4° - 5° |
5° - 10° |
| broad reach |
0° |
2° - 3° |
4° - 5° |
| downwind |
0° |
0° |
0° |
Changes in wind force will also imply a variation of the number and the type of sails set.
Current
When the sailed water is in motion compared to the fixed earth surface,
an additional correction for current must be applied to the "Course-through-the-Water".
Current is specified by set and drift.
Set is the direction in which the water flows as a result of current.
Drift specifies the speed with which the water flows.
As such, current can be represented as a vector with magnitude (drift) and direction (set).
Current is caused by tides, wind or by the general circulatory of the oceans.
Tidal currents are periodic in nature.
Information on current can be partly obtained from the nautical charts reporting seasonal
mean values for set and drift.
For regions with particular tidal currents, special tide calendars may be required to obtain
accurate information on current.
Knowing set and drift, the course correction to
account for current on the Course-over-Ground (in degrees) is determined
by vector addition of the True Speed of the vessel and the speed (drift)
of the current. From this addition, the resulting course angle can be determined
as well as the correction for current.
This vector addition is done by drawing
the "speed triangle" in which the vectors represent the involved speed
vectors. Alternatively, the vectors can be interpreted as the displacement
of the vessel in one hour, resulting from the vessel´s speed through
the water and the drift due to the current.
In the example on the right, the vessel has a
Speed-through-the-Water of 5 kn, course 60°.
Current sets with 2 kn to 315°.
The vectors are drawn on a piece of grid paper with a speed
scale of 1 kn per grid interval.
The resulting Speed-over-Ground (SoG) is 4.9 kn,
course 37°.
The course correction for current is 23° and because the current
sets the vessel to port side, this correction is negative (-23°).
|
 |
Conversion Scheme
As with the compass corrections the corrections
for leeway and current have an algebraic sign: deviations to the port (wind
and/or current from starboard) are negative - deviations to the starboard
side (wind and/or current from portside) are positive.
example |
The CoG to sail between the small islands is read from the chart: 250°.
Wind SE 5 Bft causes some current setting our vessel to starboard.
The drift due to current is determined to be +2°. Drift due to leeway is
estimated to be +5°.
Variation is read from the chart: +1° (E) and deviation is known from
the deviation table: +4° (E) for a magnetic course of 242° (see note below).
The result of the course conversion yields a steering (compass) course of
238°, which differs significantly from the CoG
read from the chart (250°).
|
Compass
Course |
Deviation |
Magnetic
Course |
Variation |
True
Heading |
Leeway |
Course thr.
Water |
Current |
Course o.
Ground |
| 238° |
+4° |
242° |
+1° |
243° |
+5° |
248° |
+2° |
250° |
| <--------- subtract corrections ------- |
|
Note on values taken from the deviation table:
The deviation table usally has data recorded for compass course in five- or even ten-degrees intervals.
So, often the exact compass course or magnetic course from the conversion schemes will not be available
from the table. In this case the entry closest to the required value is taken. Normally, there is no need to
interpolate the data to obtain more exact (sub-degree) results.
For the above conversion scheme, the required magnetic course is 242°. The closest value from the
example table on the right is 244°, corresponding to a deviation angle of +4°.
|
|
Compass
Course |
Deviation |
Magnetic
Course |
| ... |
... |
... |
| 220° |
+3° |
223° |
| 230° |
+4° |
234° |
| 240° |
+4° |
244° |
| 250° |
+5° |
255° |
| ... |
... |
... |
|
|